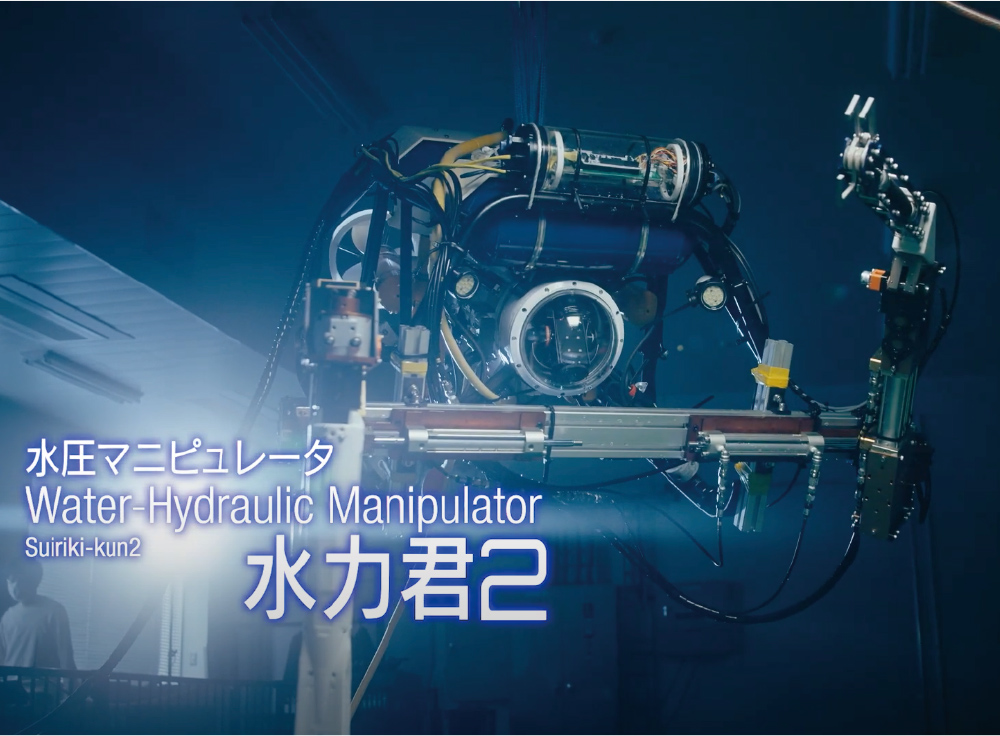
空気と水で動くクリーンでパワフルな
水圧ロボットアーム
空気と水で動くクリーンでパワフルな
水圧ロボットアーム
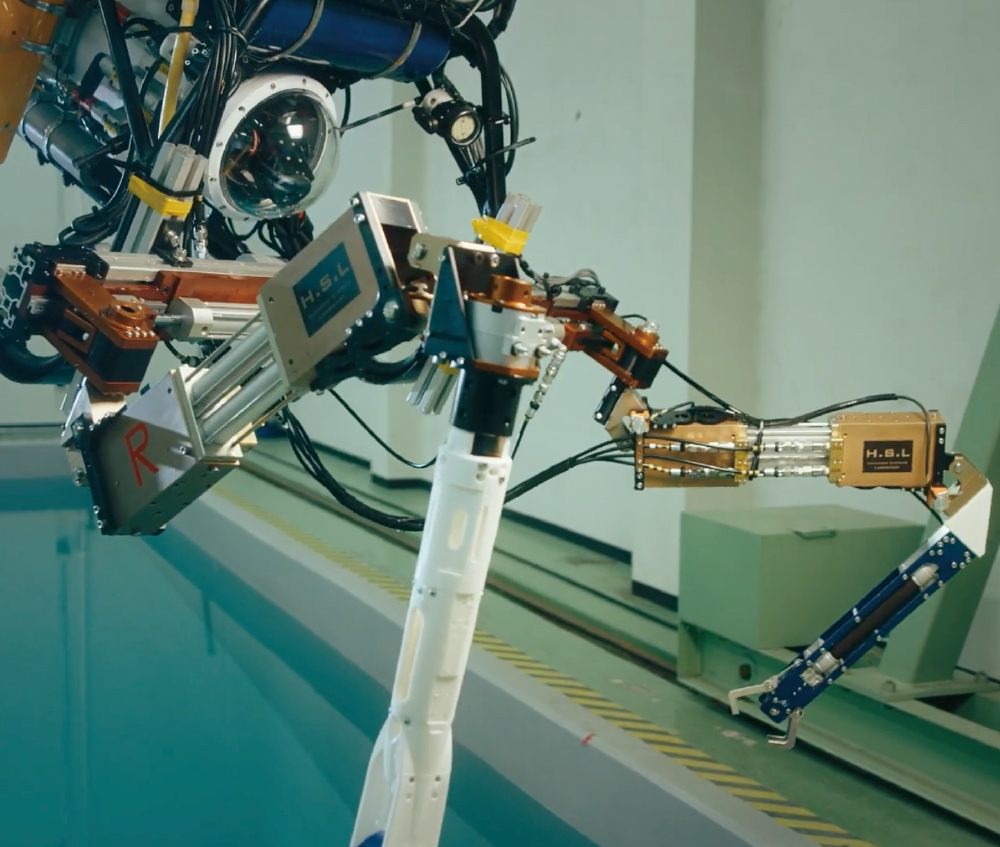
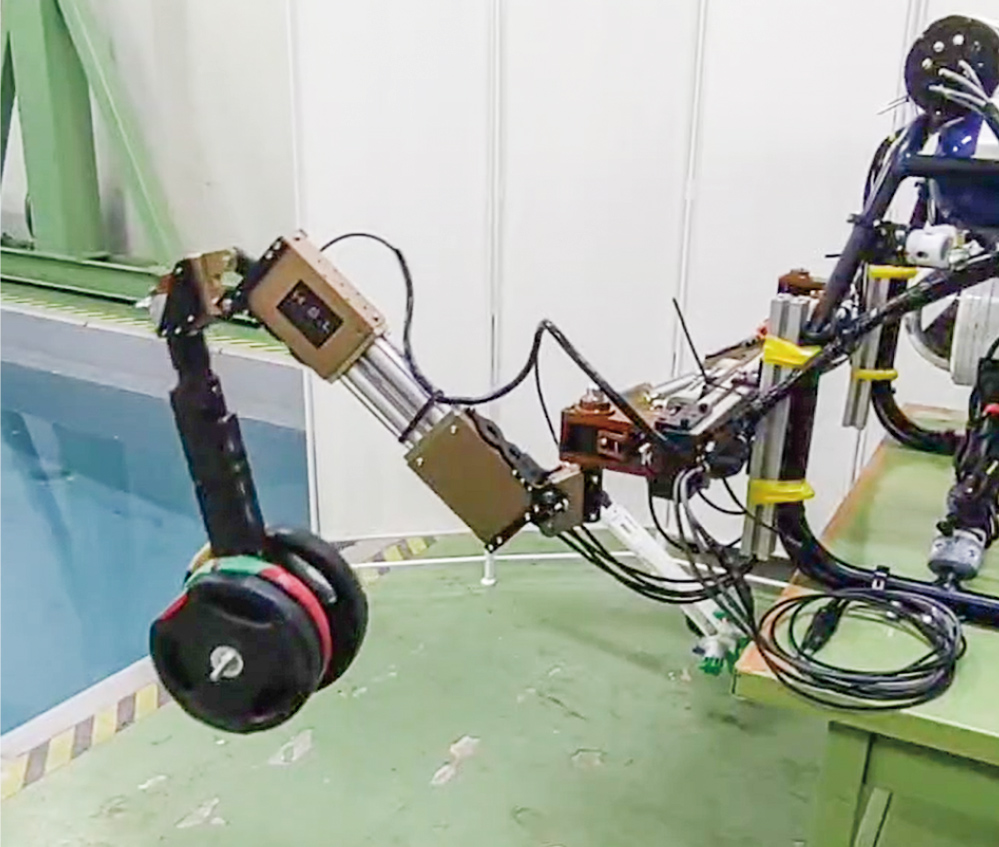
油圧並みの力を発揮する新しいタイプの水圧駆動ロボットアームを開発した。このロボットは空気圧から生成した高水圧によって手先の位置と力を制御できる。2022年度の半年間のトライアルでは、遠隔操作潜水艇(ROV)にロボットアームを2本取り付けて、水中で動作することを確認した。今後は各方面にヒアリングを行いながら、陸上も含めた様々な市場へのシーズ展開に向けて活動する。
- 所属
- 立命館大学 理工学部 ロボティクス学科
ヒューマノイドシステム研究室
- 代表者
- 玄 相昊
立命館大学 理工学部 ロボティクス学科 教授
玄 相昊 Hyon Sang Ho
早稲田大学大学院修士、東京工業大学大学院博士課程修了。東北大学助手、ATR脳情報研究所研究員などを経て、現在立命館大学理工学部ロボティクス学科教授。運動制御理論、人型ロボット等の研究開発に従事。
SOCIAL社会実装
安全性と低コスト性を生かし、
ロボット化を求める多彩な現場へ
高温多湿な作業現場は世の中に無数に存在するが、比較的単純な作業であってもロボット化(無人化・省力化)が遅れ、人手に頼っている現場は多い。それは、期待される性能とコストとのマッチングが取れていないからである。当技術が有する安全性と低コスト性を最大限に生かし、現場の人たちとともに、地道にシーズ技術の社会実装を実現したい。
ORIGINALITY研究の独自性
クリーンなエネルギーで
油圧並みのパワーを実現
市販の高圧洗浄機のように、離れた場所にある駆動ユニットから水圧ホースでつながったロボットアームが仕事をする。特徴として、(1)本体に油や電気を用いないためクリーンで漏電の心配がない (2)壊れても簡単に取換や修理ができる (3)動作が柔らかくてパワフル、という点があげられる。したがって、農作業などの屋外作業をはじめ、高所や水中など悪環境における各種遠隔作業に利用可能である。
VISION将来の展望
実証実験を着実に行いながら
2028年の実用化をめざす
まずは少数の用途に絞ってシステムをカスタマイズし、実証実験を行っていく。例えば移動台車に取り付けての高所作業や、岸壁から昇降装置を用いた長時間の水中作業を計画している。市場規模2千億円の作業用ROV市場への参入を意識し、2028年の実用化をめざす。その他、アクチュエータの単独販売、知財ライセンスの可能性なども具体的に検討する。