坂道でも平地のように車椅子を漕げる
サーボブレーキ付き車輪ユニット
坂道でも平地のように車椅子を漕げる
サーボブレーキ付き車輪ユニット
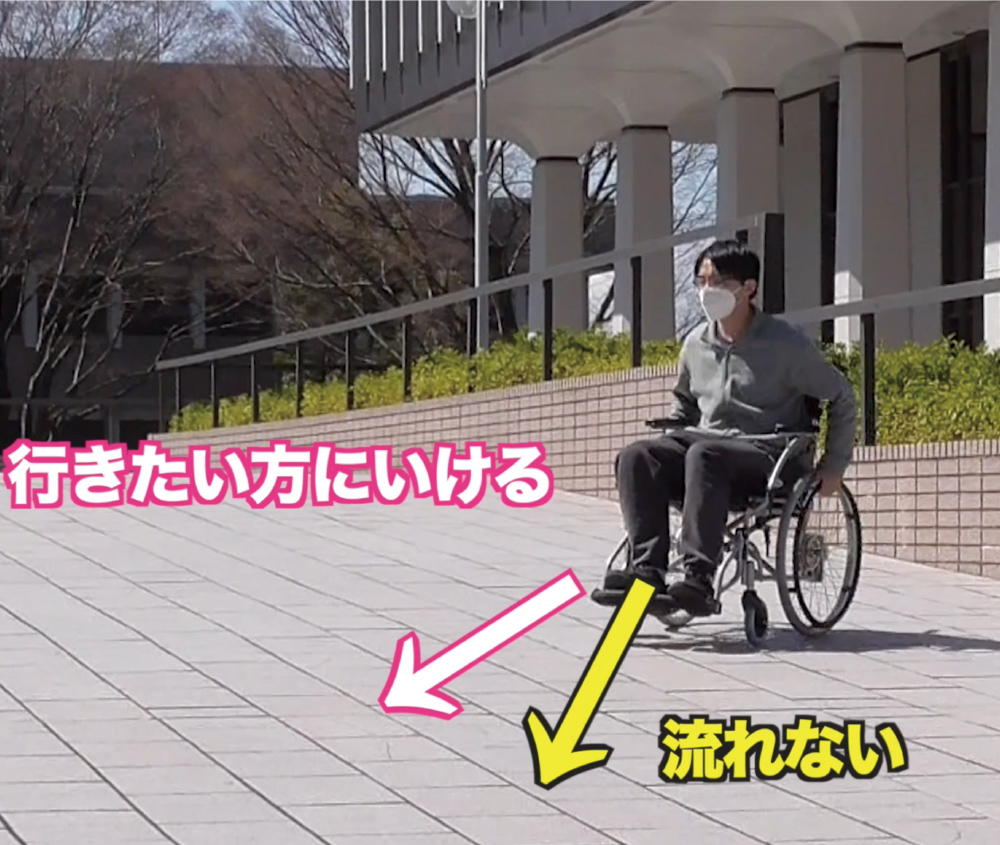
世の中で使用される大半である手動の車椅子には、歩道に傾斜があると重力に引かれて車道に飛び出しやすいという、歩行者には気づきにくいリスクがある。私たちはロボット工学と人間工学を応用し、坂道でもあたかも平地のように車椅子を漕ぐことができる走行支援技術を開発した。車椅子に外付けする小さなブレーキにより重力を打ち消し、また漕ぎ手の癖から進む方向の推定も行うことで、スムーズな走行をサポートする。
- 所属
- 関西学院大学 中後研究室
- 代表者
- 中後 大輔
関西学院大学 工学部 知能・機械工学課程 教授
中後 大輔 Daisuke Chugo
2005年埼玉大学大学院理工学研究科後期博士課程を修了。東京大学研究員、電気通信大学助教を経て2009年新設された関西学院大学理工学部人間システム工学科に専任講師として着任。同大准教授を経て現職。
SOCIAL社会実装
小型で安価な装置で
世界の車椅子へ実装をめざす
いかに優れた技術であっても、ユーザーがリーズナブルだと感じなければ使われない。当技術は、車椅子に容易に取り付けられる小型で安価な装置でありながら、坂道のような危ない場面での安心と快適な走りやすさというしっかりとした価値を提供することができる。実用化の際の価格帯としては、1ユニット1万円程度を想定しており、日本はもちろん世界初の技術として、世界6千万台の手動車椅子に実装できれば、6千億円程度の市場規模が見込める。

ORIGINALITY研究の独自性
下りでも重力に引かれることのない、
スムーズな走行を実現
当技術の独自性は2点あげられる。1つ目はブレーキで漕ぎ手の動作をサポートする点。下り坂でも重力に引かれることなく、平地で漕いでいるのと同様に、漕ぎ手の思い通りに走行できる。2つ目は、漕ぎ手の動きを推定する点。人間の手足の動きには生物らしい滑らかさがあるという特徴から、漕ぎ始めの車輪に“ぐっ”と力を入れる動作を車速センサで計測することによって、漕ぎ手がどう動きたいのかを推定し、スムーズな走行につなげている。
VISION将来の展望
すべての車椅子利用者に
安心と安全を届ける
まずはブレーキユニットを装備した完成品の車椅子として世にリリースしたい。同時に、(福祉用具としての承認を受け)保険適合させ、補助を得られるようにすることで車椅子ユーザに広く使われるようにしたい。手動車椅子の走行支援装置は、国内外を問わずまだ世になく、“地球上の誰一人残さない”というSDGsの理念にも沿う技術。すべての人に安全と安心を届ける技術として、世界で広く役立てられるよう活動していきたい。

image photo